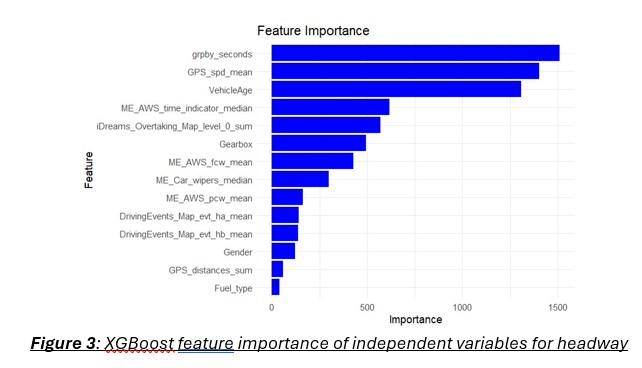
With advancements in intelligent vehicle technology, real-time crash prediction has gained in-creasing attention due to its proactive approach and the widespread integration of Advanced Driver Assistance Systems (ADAS). Within this context, this work endeavours to employ a deep and machine learning methodology for real-time crash prediction using in-vehicle cameras and GPS sensors. Towards that end, a naturalistic driving experiment was carried out involving 135 car drivers and a large database of 31,954 trips was collected and analysed. The most prominent driving behaviour indicators, including speeding, duration, distance and harsh events were examined. Feature importance analysis (XGBoost) was implemented to evaluate the significance of various variables in forecasting STZ levels of headway. The results of predictive analyses revealed high accuracy for the Neural Network model of up to 81.7%. Random Forests exhibited higher performance, leading in satisfactory accuracy of 86.9% while Decision Trees and k-Nearest Neighbors showed lower but moderate performance.
| ID | pc597 |
| Presentation | |
| Full Text | |
| Tags |







