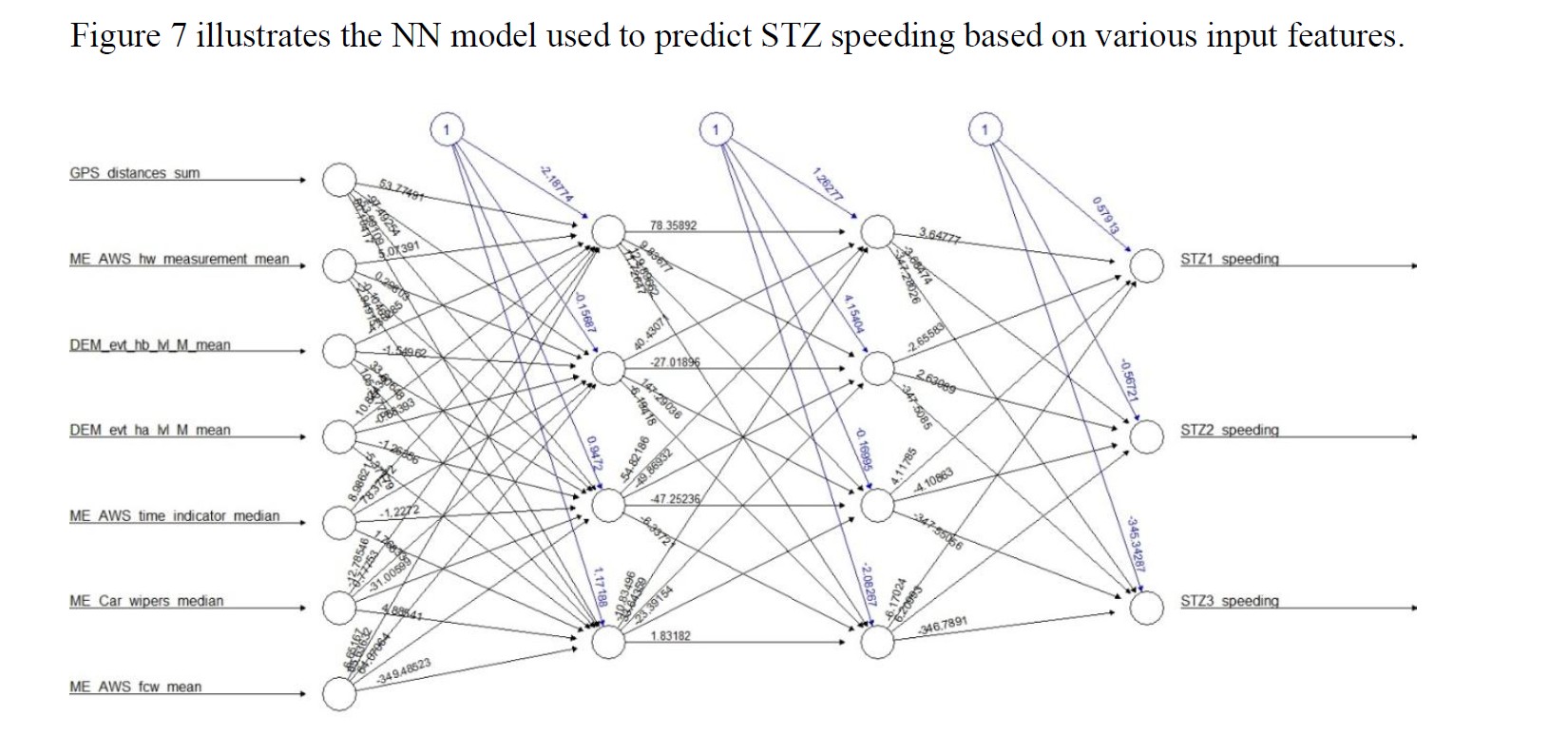
Safety Tolerance Zone (STZ) is an abstract entity in nature which refers to a real phenomenon, i.e. self-regulated control over transportation vehicles by human operators in the context of crash avoidance. The aim of this study was to assess driver, road and environment indicators for the identification of STZ. Towards that end, data from a simulator experiment, involving 55 drivers, were analysed. A feature importance algorithm was used to evaluate the significance of variables on forecasting STZ. Additionally, a Neural Network model was implemented for real-time data prediction. Furthermore, a comprehensive assessment of the performance of three machine learn-ing classifiers (i.e. Decision Trees, Random Forests and k-Nearest Neighbors) was made. Neural Networks demonstrated that the level of STZ can be predicted with an accuracy of up to 85.1%. Results also indicated that RF model outperformed the DT and kNN models across all metrics, with accuracy up to 89.1%.
| ID | pc571 |
| Presentation | |
| Full Text | |
| Tags |







